车辆运动学模型
自行车模型
自行车模型简化了车辆的运动学模型,通常适用于低速场景下的车辆控制。自行车模型只考虑前后两轮,并且不考虑车辆的测滑,车辆的转向由前轮控制,后轮驱动速度。下面简要讨论自行车模型:
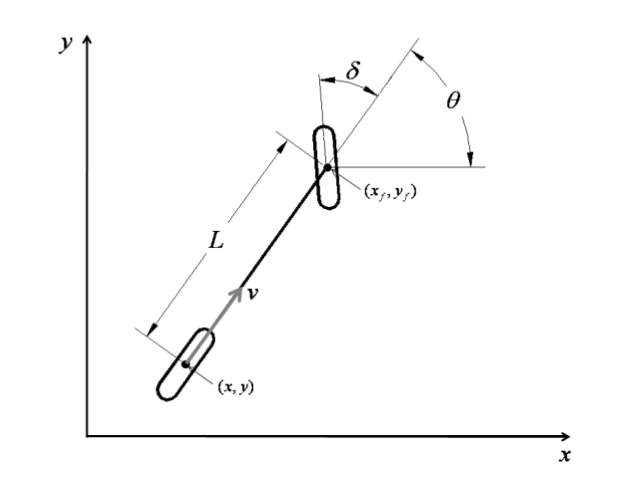
上图是自行车运动学的示意图,其中$(x_f, y_f)和(x, y)$分别是车辆的前轮坐标和后轮坐标,$L$是轴距,$\theta$是车辆的航向角,$\delta$是车辆的前轮抓角。
在自动驾驶控制中,通常会研究车辆的运动学方程,也即如何由当前状态推演到下一个状态,而这个过程也可以考虑为函数的泰勒展开。
假设在$\Delta t$时间内,车辆在$x$方向的变化量为$\dot{x}$,在$y$方向的变化量为$\dot{y}$,
根据刚体的运动约束,我们可以得到如下几条公式:
根据$x_f, y_f$和$x,y$之间的关系,
消除$x_f, y_f$有,
$$
\begin {align*}
0 &= \dot{x_f} \sin(\theta + \delta) - \dot{y_f} \cos(\theta + \delta)
&= \frac{\nabla(x+L\cos(\theta))} {\nabla t} \sin(\theta + \delta) - \frac{\nabla (y+L\sin(\theta))}{\nabla t} \cos(\theta + \delta)
&= (\dot{x} - \dot{\theta} L \sin(\theta)) \sin(\theta + \delta) - (\dot{y} + \dot{\theta} \cos(\theta)) \cos(\theta + \delta)
&= \dot{x} \sin(\theta + \delta) - \dot{y} \cos(\theta+\delta)
&- \dot{\theta} L \sin(\theta) (\sin(\theta)\cos(\delta) + \sin(\delta)\cos(\theta))
&- \dot{\theta} L \cos(\theta)(\cos(\theta)\cos(\delta) - \sin(\delta)\sin(\theta))
&= \dot{x} \sin(\theta + \delta) - \dot{y} \cos(\theta+\delta) - \dot{\theta}L \cos(\delta)
\end {align} \tag{4}
\dot{x}\sin(\theta + \delta) - \dot{y}\cos(\theta + \delta) - \dot{\theta} L \cos(\delta) = 0
\dot{x} = v \cos(\theta)
\dot{y} = v \sin(\theta)
\dot{\theta} = \frac {v \tan(\delta)}{L}
\begin{align}
R = \frac {v} {\dot \theta}
\frac {v \tan(\delta)} {L} = \frac{v}{R}
\tan{\delta} = \frac {L} {R}
\end{align*} \tag 7
$$
(7)式用于pure-pursuit中。
我们将(5), (6)用增量方程表示: 或者, 其中,$\gamma, a$分别表示前轮转角的速率和加速度,或者 根据增量方程,可以比较容易的推出下一个时刻的状态,假设车辆状态可以用$\mathbb x(t)$表示,则, 基于式(11),我们可以得到各类方程,一种常用的方程: 当然根据状态表示的不同,可以得到不同的状态方程。
Path Coordinate
大部分时候,我们可以直接在全局坐标系下,做控制,但是有些情况下,需要在路径坐标下做控制。
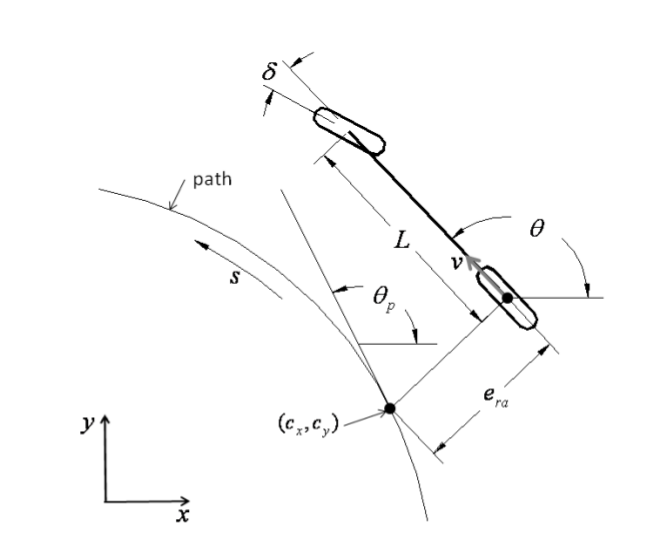
如图所示,$\theta$是车辆的航向角,$\theta_p$是车辆最近点P$(c_x, c_y)$的切线角度,$e_{ra}$是横向距离误差。对于轨迹,可以将$\theta_p$表示关于距离s的函数。
定义方向误差$\theta_e$,且有 根据曲率计算公式,有: 也即是 我们先看$e_{ra}$的增量,: 接下来,我们计算$\dot s$,s的计算需要回到x-y坐标系下。我们知道在$\Delta t$时间内,车辆水平方向移动的距离为$v \cos(\theta)$,所以根据p点的切线方向有: 也即是 1根据式(15)和式(17),可得 所以如果将状态表示为$(s, e_{ra}, \theta_e)$,我们可得增量方程为: 有了状态方程之后,我们就可以考虑使用MPC或者LQR计算车辆控制了。
reference
- Automatic Steering Methods for Autonomous Automobile Path Tracking
- Improved Trajectory Planning for On-Road Self-Driving Vehicles Via Combined Graph Search, Optimization & Topology Analysis