EKF-SLAM
注:这里是在SLAM_Course 材料的基础上对ekf-slam及其实现过程进行阐述,建议对比原文来看
Simultaneous Localization and Mapping (SLAM)问题介绍
SLAM中文翻译同时建图与定位,是一种广泛存在于生活中的问题:当我们探索一个未知空间的时候,就是一个建图与定位的过程,一边在空间中行走,一边观察空间中的标记物,并在脑海中逐渐构建一副地图,根据这幅地图,我们可以判定如何从这个空间中离开,判定当前所在的未知。SLAM技术目前主要应用于移动机器人技术,包括仓储机器人以及自动驾驶。
SLAM通常包含3种不断重复的操作:
- 移动:机器人移动到一个新位置,通常可以根据移动指令及运动模型推断得到新的位置,但是由于移动过程包含了不可消除的噪声,所以计算得到的位置并不准确,这里比较关心车辆的运动模型Motion model
- 观测环境中的地标点:当移动到一个新位置后,机器人可以感知得到环境中新的地标点,这些地标点会被加入到地图中。我们需要根据机器人位姿和感知数据,确定地标点在地图上的位置。由于传感器感知也包含了各类噪声,所以同样无法准确计算地标点的位置。这里比较关心逆向观测模型(Inverse observation model)
- 将观测到的地标点和地图上已有的地标点关联起来。在移动过程中,机器人可能会在多个位置观测到同一个地标,如果计算准确以及不存在噪声,那么机器人在不同位置观测相同的地标得到的位置应该是相同的,但是实际过程中,噪声以及计算误差会使得计算的位置有比较大的偏差。这时可以通过将数据关联起来,消除运动过程和观测过程的累计误差。这里比较关心观测模型(Direct observation model)
针对这3个操作,这里只探索平面上的机器人移动,对于三维空间上的移动这里暂不考虑。
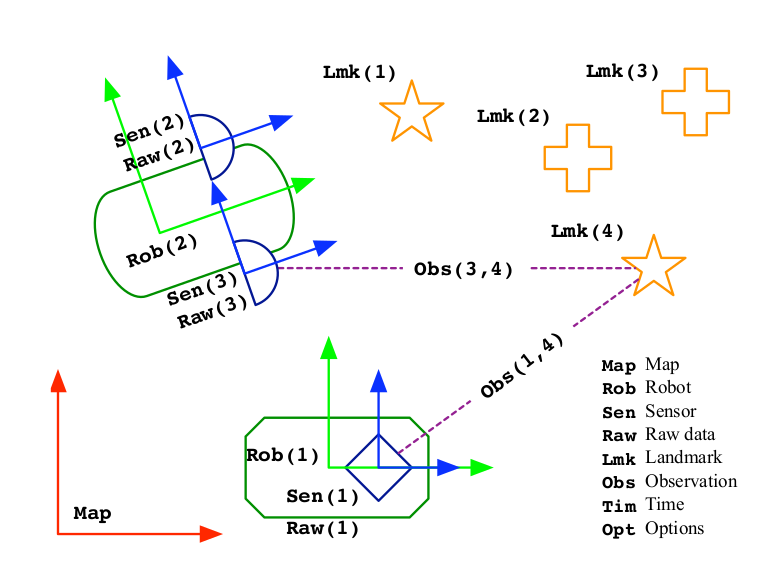
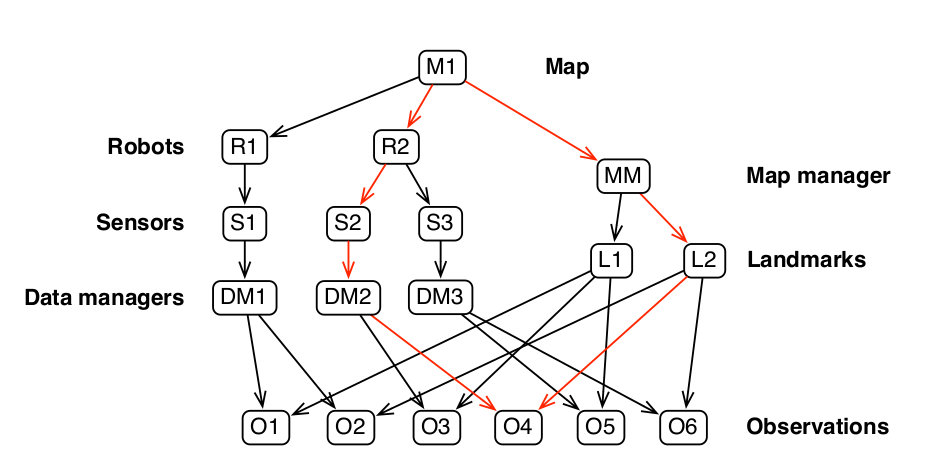
SLAM中的各种关系:
三类模型介绍
-
Motion-model
通常机器人的移动是根据发出的指令信号$\mathbb u$和扰动量决定: 通常机器人的状态可以用$\mathcal R_2 = (x, y, \theta)$表示,三维是用$\mathcal R_3=(x, y, z, roll, pitch, yaw)$表示。例如在低速情况下,可以用自行车模型作为运动模型。模型具体根据机器人的移动方式来选择。
-
Observation-model
机器人通过某个传感器S观测到某个地标点$\mathcal L_i$,则有测量值$\mathbb y_i$:
-
Inverse-observation-model
通过测量值和车辆的状态,我们可以得到地标$\mathcal L_i$: 理想情况下,g是h的逆,但是很多时候h是不可逆的,例如单目视觉里。
EKF-SLAM
这里假设已经了解EKF—SLAM算法了,如果不清楚,可以参看EKF
这里先给出EKF和SLAM以及机器人的动作对应关系表。
| Event | SLAM | EKF |
|---|---|---|
| Move | Robot Motion | ekf prediction |
| 观测到新的Landmark | Landmark 初始化 | 添加状态 |
| 观测到已有Landmark | 地图修正 | EKF-correction |
| 地图上已有landmark损毁 | Landmark 删除 | 状态删除 |
接下来,我们分别讨论每一类事件,并讨论如何维护地图。
map
map中主要保存的是已有的地标点,而在ekf-slam中,通常将机器人的状态和地标的状态一起保存维护: 在ekf中,需要用均值$\mathbb{\bar x} $和方差$P$表示状态$\mathbb x$,
所以关键就是如何维护均值跟方差。
地图初始化
初始时,地图上没有地标点,并且所有状态都是确定的,不存在不确定状态,$\mathbb {\bar x}和方差P$分别是:
Robot Motion
机器人的运动只会影响机器人的状态,对地标的状态没有影响,通常来说根据车辆移动模型我们知道: 所以EKF的预测步骤有: 其中, $F_{\mathbb n} N F_{\mathbb n}^T$实际中,也可以直接写成过程噪声矩阵$Q$。
由于机器人的移动只影响了机器人的状态,也就是: 所以可以确定雅克比矩阵$F_{\mathbb x}$一定是稀疏的,可以表示为:
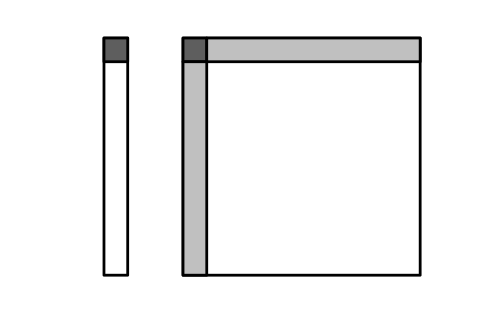
Robot motion 时,地图数据更新。左侧是状态,右侧是方差。其中左侧深灰色是机器人状态,右侧深灰色表示的是机器人状态的协方差矩阵,浅灰色分别表示$\mathcal R \mathcal M$ 和$\mathcal M \mathcal R$的协方差矩阵。
为了减少无用计算,实际的预测过程则按照以下的几条公式求解:
观测到已有地标
先讨论当观测到已有地标时如何更新地图状态。假设测量函数为: 其中,$\mathbb y$是测量值,$\mathbb x$是当前的状态,$\mathbb v$是观测噪声,$h$是观测函数,EKF过程基本可以写成如下形式:
其中,$H_{\mathbb x} = \frac {\partial h(\mathbb {\bar x})} {\partial \mathbb x}$。
在Ekf-slam中,地标的状态,只跟Robot状态,传感器以及地标有关,所以观测模型可以写成如下形式: 所以$H_{\mathbb x}$是一个稀疏的矩阵,其形式如下: 其中,
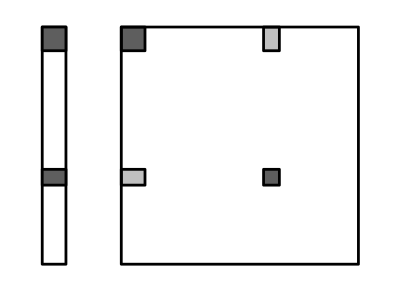
观测到已有目标时更新地图的状态,左侧是地图状态,右侧是协方差矩阵。
完整的更新公式如下:
地标初始化
当观测到新地标时,需要将地标初始化并加入到地图中维护状态。这里需要根据观测模型是不是可逆分解成两种情况。
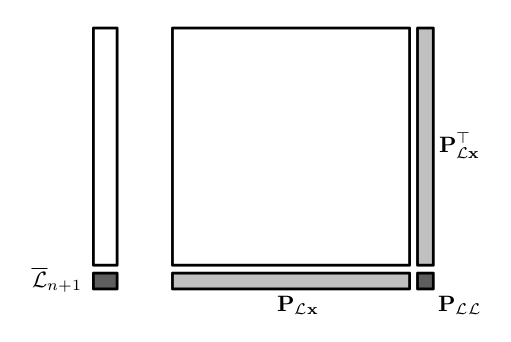
新添加地标时,状态向量和协方差矩阵要更新的部分。
如果观测模型可逆,也就是$h$存在反函数$g$,这时地标位置: 下面分别计算$\mathcal {\bar L_{n+1}}和P_{\mathcal R \mathcal L_{n+1}}$,
所以完整的更新如下:
如果观测模型不可逆,通常是依据某个先验信息求解,比如单目相机会依据摄像机的内外参数求解,一般反向映射函数可以写成如下形式: 其中$\mathbb s$是先验信息。假设$\mathbb s$是均值,$S$是其方差,则有
所以完整的更新如下: